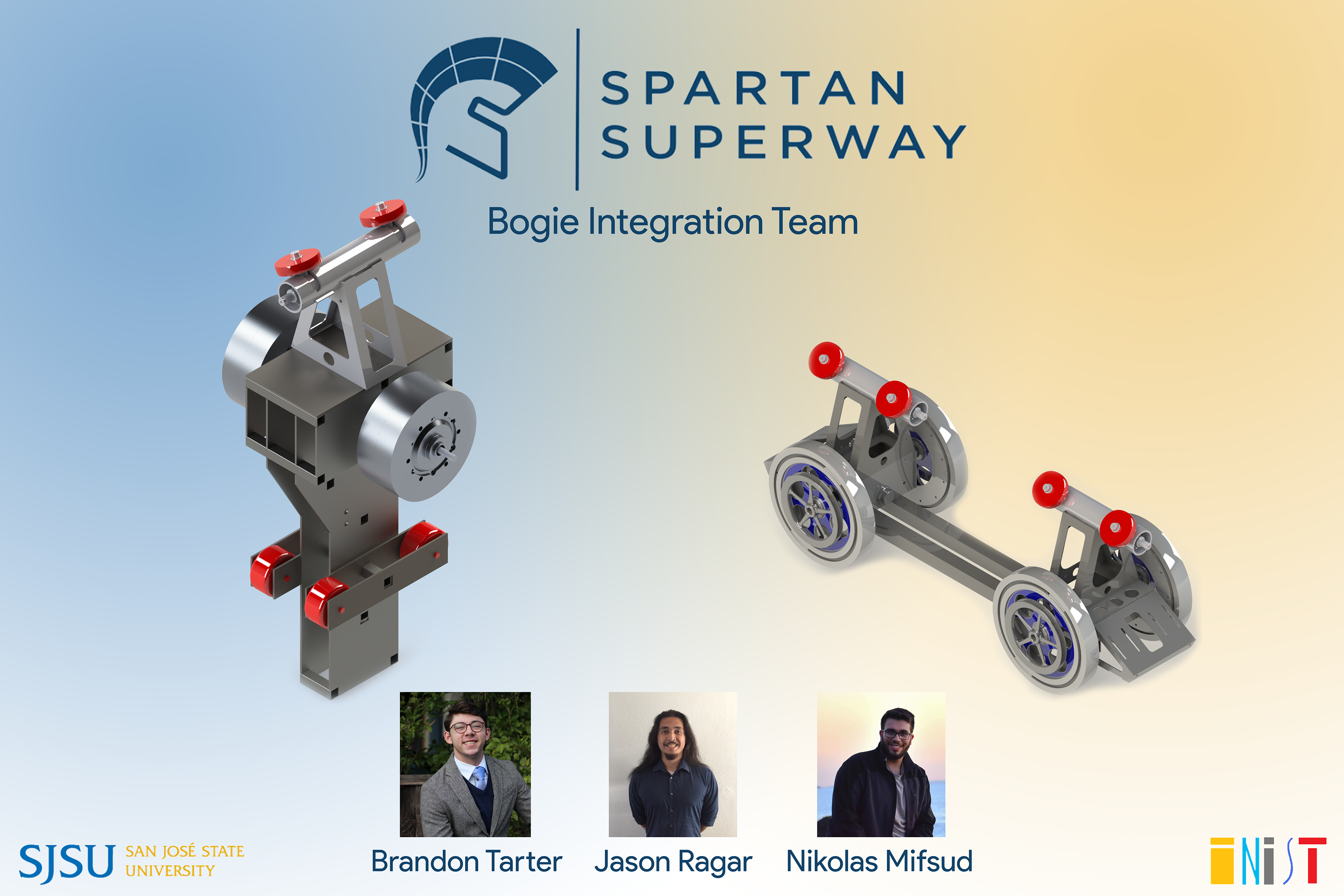
The project poster for our presentation at the SJSU Mechanical Engineering Alumni Event
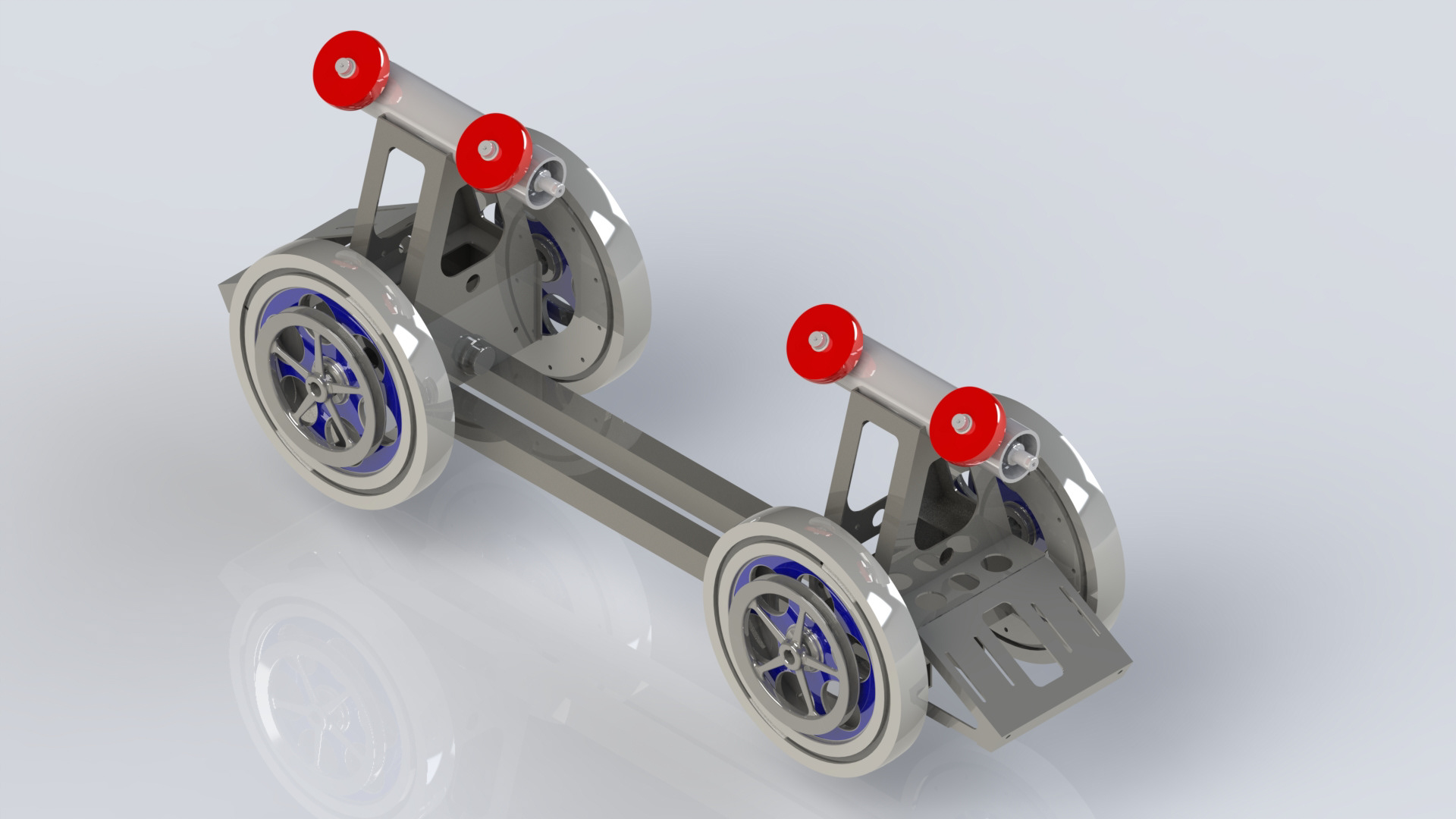
The drive bogie served as the propulsion for the entire system. The bogie was designed to utilize two in-hub motors as well as contain all necessary sensors and wiring for operation.
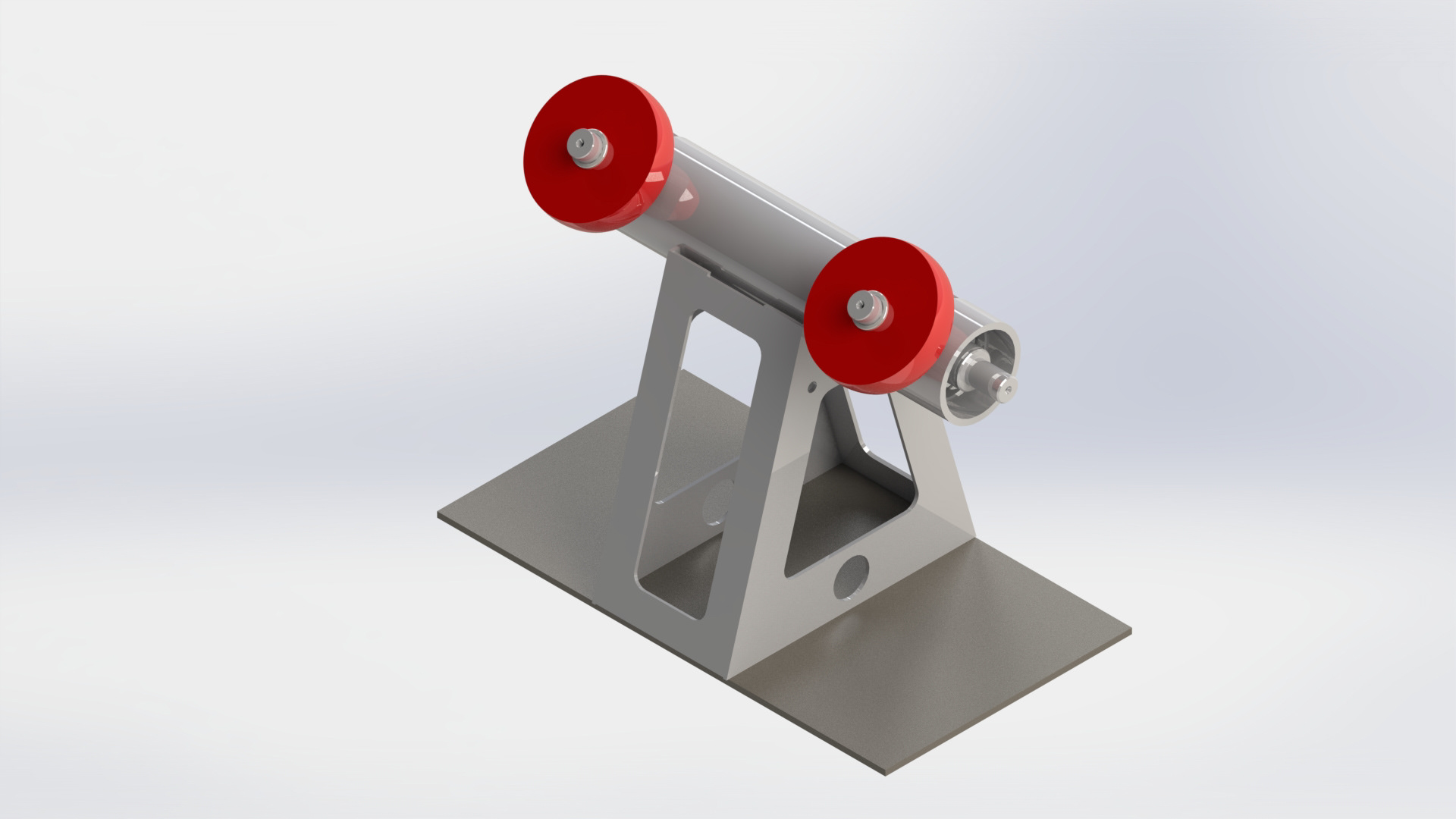
The slave bogie served as the load-bearing component of the bogie system. Below the slave bogie would be the cabin with energy storage systems.
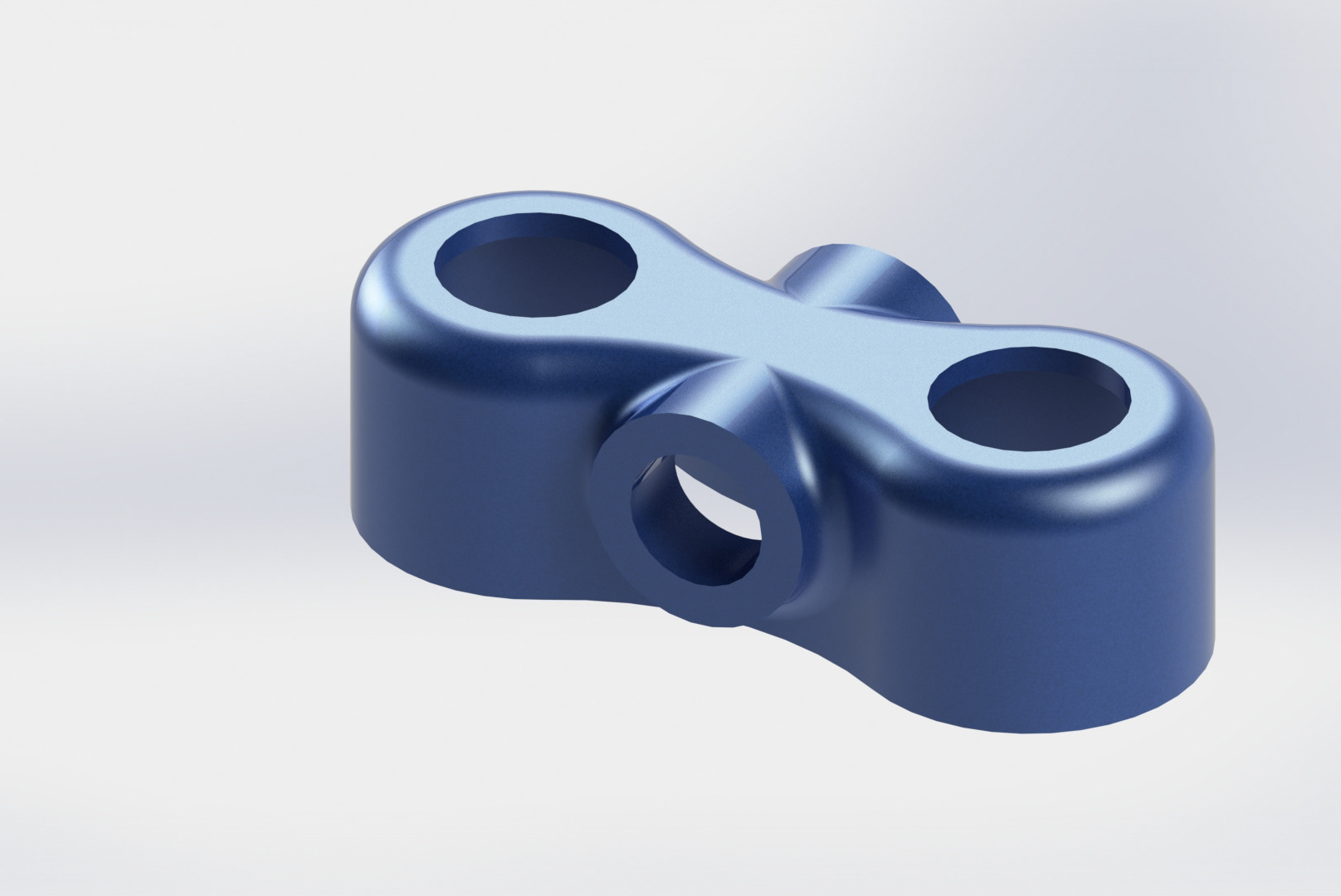
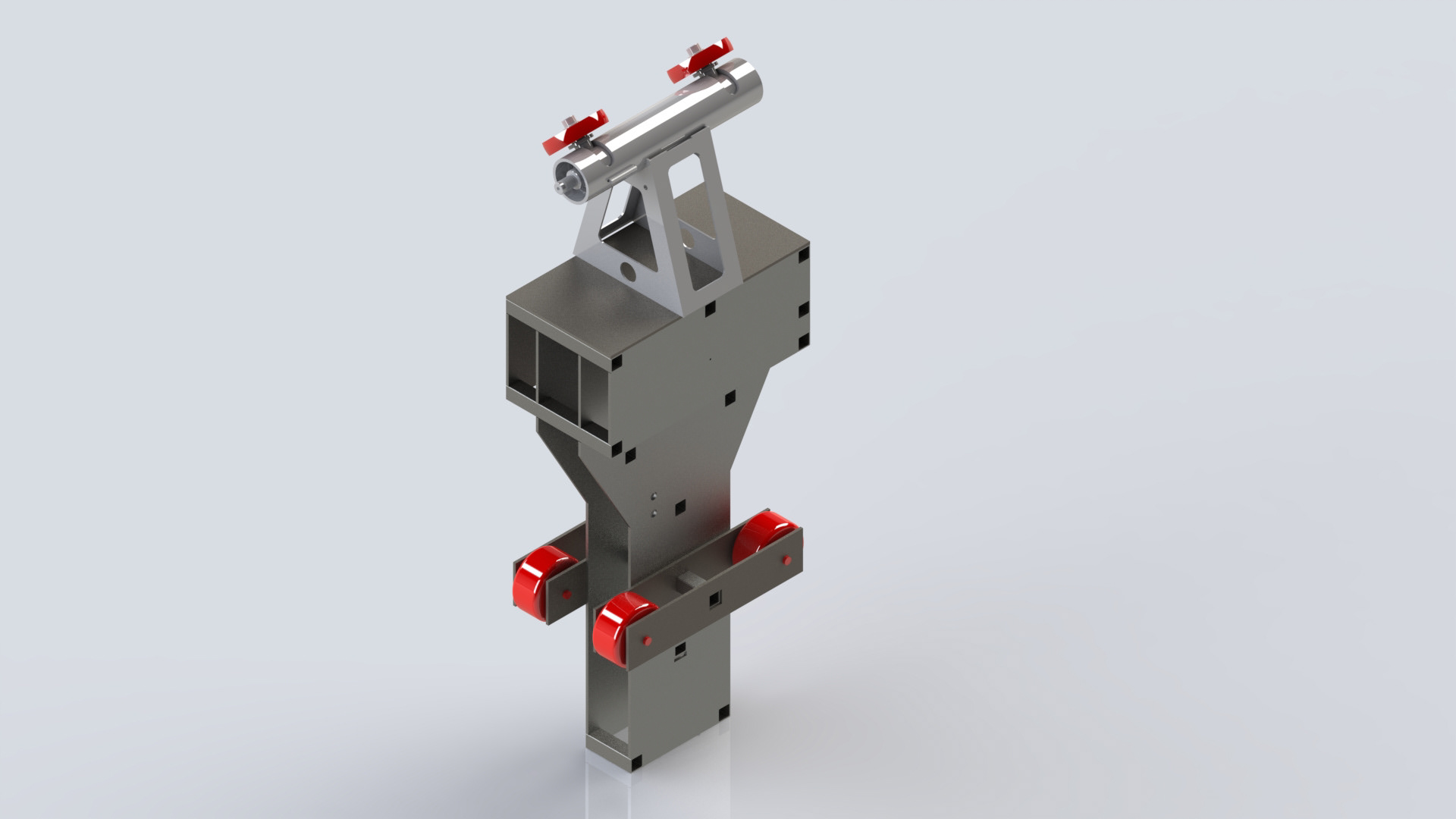
The passive rail clamping system for the drive bogie. The purpose of this system is to provide a counter to the moments experienced by the single drive wheel to maintain a stable ride.
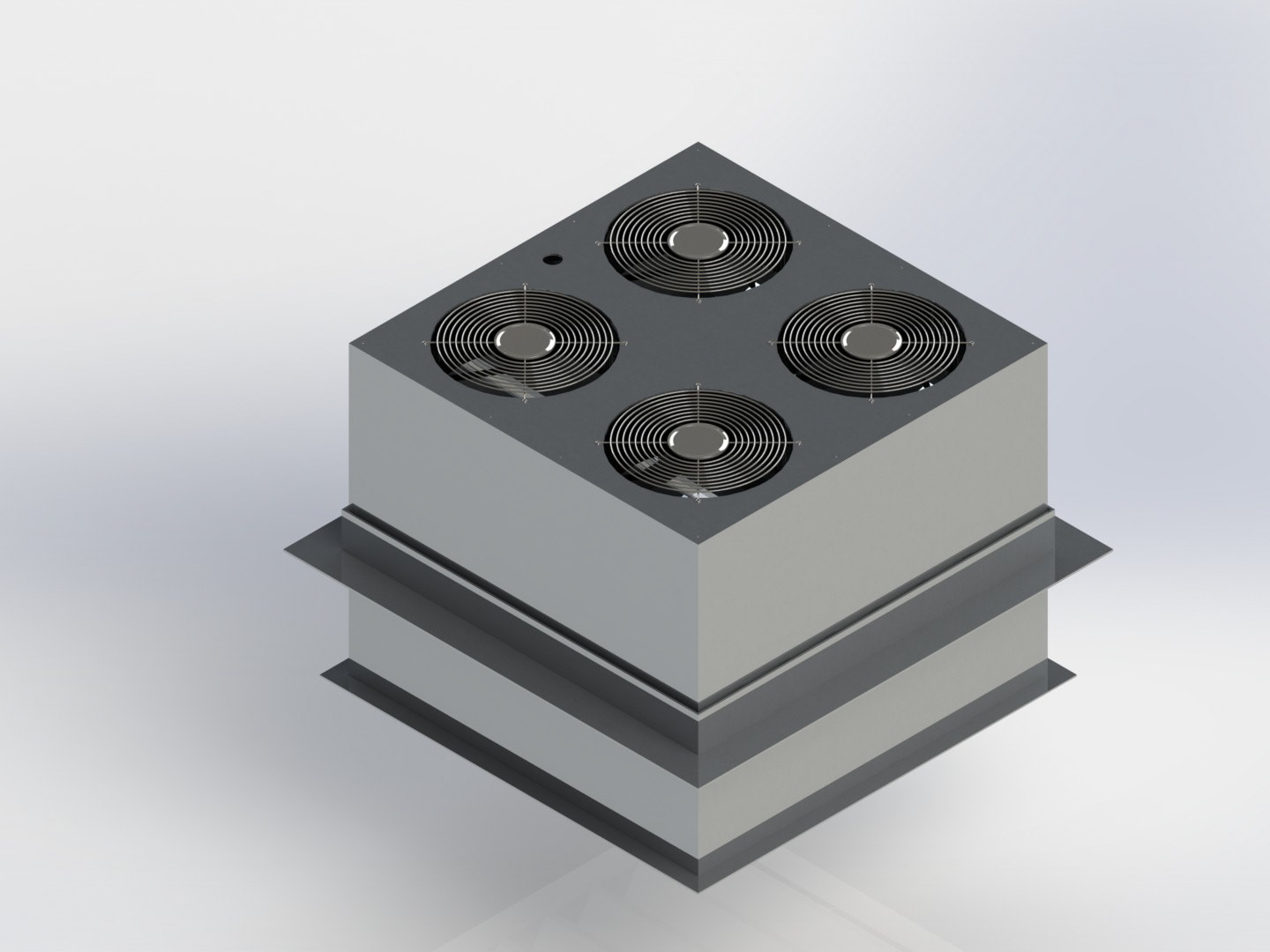
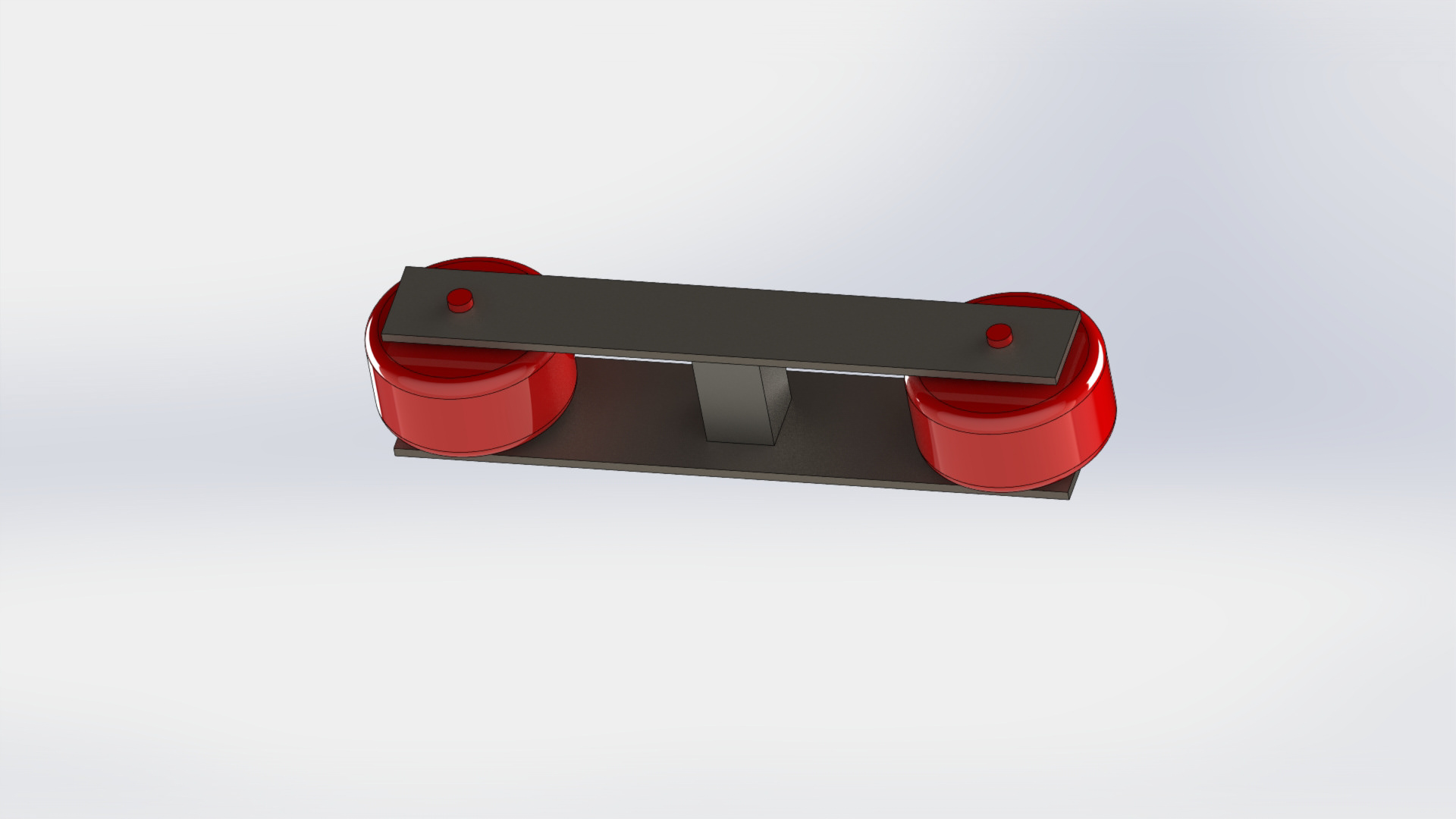
The route selection system for the bogies. This was to maintain stability and guide the bogies around a turn.

Our assembled bogies mounted to a wooden test track